Adaptive Median Filter for Image Corrupted by Salt and Pepper Noise
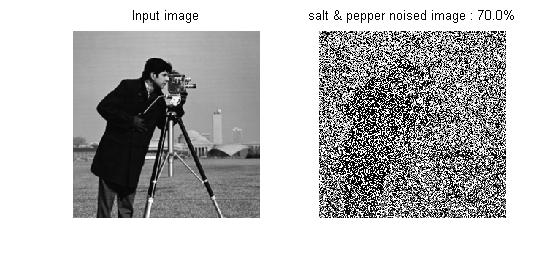
The image denoising is a preprocessing step in image processing and is used to recover the image which is corrupted by noise. It shown below the image corrupted by impulsive noise or salt and pepper noise is denoised by Adaptive Median filter.
Impulsive noise is added to an image when the image is transmitted over a noisy channel and decoding error on the receiver side. It is modelled by imnoise function in Matlab programming.
Median filter with small fixed window size is a preferred technique for denoising an image corrupted by salt & pepper noise because of simple and efficient. However, it is performance decreased the image corrupted by high density noise pixels.
Adaptive Median filter changing it's window size depends on density of noise is a preferred technique for denoising an image corrupted by high density salt & pepper noise.
Denoised image by Adaptive median filter

Adaptive Median Filter - Algorithm steps
- set ws=3, wsmax =21
- m,n - row and column index of noised image
- read neighbouring-pixels w.r.t m,n and ws
- Find S1,S2 and S3
- S1 = min(neighbouring-pixels)
- S2 = median(neighbouring-pixels)
- S3 = max(neighbouring-pixels)
- IF IS-ASCENDING[S1,S2,S3] AND S1 >pixel(m,n)< S3 THEN
- pixel(m,n) not corrupted
- ELSE pixel(m,n) replaced by S2
- ELSE
- increment ws by 2
- IF ws > wsmax THEN break
Matlab programming - Adaptive Median Filter
function adaptwindsp
%adaptive median filter salt pepper denoising
clc; clear all;
close all;
% read an image from a file and store their intensity in a 2D matrix, im
fname= 'cameraman.tif';
[im,map] = imread(fname);
%find number of rows and columns in the image
[N,M]=size(im);
% percentage of noise (salt & pepper) to add into the input image
noisep =70/100;
nim=imnoise(im,'salt & pepper',noisep);
% initialize denoised image matrix with zeros elements
dim=zeros(M,N);
% set maximum median filter window size
wsmax=21;
for m=1 : M
for n=1 : N
% set minimum median filter window size
ws =3;
while ( ws < wsmax )
% neighbouring subscripts of centre pixel
hws = floor(ws/2);
[J,I]=meshgrid(n-hws:n+hws ,m-hws:m+hws);
I=I(:); J=J(:);
% exclude subscripts out of border of the image
if ( m<=hws || n<=hws || m>=M-hws || n>=N-hws)
s =(I>=1 & I<=M);
I=I(s); J=J(s);
s =(J>=1 & J<=M);
I=I(s); J=J(s);
end
% converts neighbouring subscripts index
ind = sub2ind([M,N],I,J);
% minimum of neighbouring pixels
S1 = min ( nim(ind) ) ;
% median of neighbouring pixels
S2 = median ( nim(ind) );
% maximum of neighbouring pixels
S3 = max( nim(ind) );
if ( S1<S2 && S2<S3 )
if ( nim(m,n)>S1 && nim(m,n)<S3 )
dim(m,n) = nim(m,n);
else
dim(m,n) = S2;
end
break;
else
% increment median filter window size by 2
ws = ws+2;
% if max window size reached, set S2 as denoised pixel and
% break the while-loop
if ( ws > wsmax )
dim(m,n) = S2;
break;
end
end
end
end
end
% display input image & noised (salt & pepper) image
figure;subplot(1,2,1);imshow(im,map); title('Input image');
subplot(1,2,2);imshow(nim,map);
title( sprintf( 'salt & pepper noised image : %.1f%',noisep*100));
L=M*N; dim=uint8(dim);
% sum absolute difference between original and denoised image
mae=(1/L)* sum(sum( abs(im-dim) ));
% mean square error between original and denoised image
mse=(1/L)* sum(sum((im-dim).^2));
% peak to signal ratio between original and denoised image
psnr=20.0* (log10(255/sqrt(mse)));
% display noised (salt & pepper) image and denoised image
% by adaptive median filter
figure;subplot(1,2,1);imshow(nim,map);
title( sprintf( 'salt & pepper noised image : %.1f%',noisep*100));
subplot(1,2,2);imshow(dim,map);
title( sprintf( 'Denoised Image : %.2f db', psnr ));
Adaptive Median Filter Image Denoising - Experiments & results
Input image size : 256 x 256 salt & pepper noise percentage : 70.0 mean absolute error : 3.54 mean square error : 20.70 psnr : 34.97

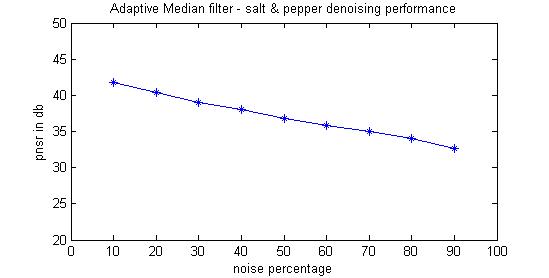
Adaptive Median Filter performance graph - noise-level vs psnr

error in code...debug and upload
ReplyDelete